Download Classical Mechanics: Rotational Motion and more Lecture notes Classical Mechanics in PDF only on Docsity!
Rotational Motion
Rotational motion about a fixed-axis : non-zero
θ, ϕˆ component
I Change in orientation of extended object about a point / axis
I Translational motion but observed from a fixed point / axis
I Rotational motion about a point / axis
In 2-dimension, a particle moving with a velocity in a straight line,
~v = ˙x
i + ˙y
j, is equivalent to a rotational motion ~v = ˙rˆr + r ϕ˙ ϕˆ about the
origin or z-axis, where ˙r is the radial velocity and ϕ˙ ≡ ω is the angular
velocity. The term r ϕ˙ is the tangential velocity whose direction changes
with ˆϕ but its magnitude remains constant. In 2-dim ω is just a number.
In 3-dimension, ~v = ˙x
i + ˙y
j + ˙z
k = ˙rˆr + r
θ
θ + r ϕ˙ sin θ ϕˆ. Tangential
velocity in ˆϕ is r ω sin θ, implying ~ω = ω
k, ˆk being the axis of rotation.
~v = ~ω × ~r = r ω
k × ˆr
= r ω
k × (sin θ cos ϕ
i + sin θ sin ϕ
j + cos θ
k)
= r ω sin θ(− sin ϕ
i + cos ϕ
j) = r ω sin θ ϕˆ
Rotational motion : Kinematics
In 3-dimension, we assign ˆk as axis of rotation, ϕ~ = ϕ
k. (N.B. angular
position cannot be represented by a vector.)
d ~ϕ
ω~ =
d ϕ~
dt
α ~ =
d~ω
dt
d
2 ϕ~
dt
2
d~r = d ϕ~ × ~r
v = ~ω ×
r
~a =
d~v
dt
d
dt
(~ω × ~r ) = α~ × ~r + ~ω × (~ω × ~r )
Since the relationship between ϕ, ~~ ω, ~α is the same as that between
~r , ~v , ~a, we have similar kinematical formulas,
a(t) =
a const.
~v (t) = ~v 0
r (t) =
r 0
v 0 t +
1
2
at
2
~α(t) = ~α const.
~ω(t) = ~ω 0
ϕ ~(t) = ϕ~ 0
1
2
~αt
2
Examine the R.H.S. of linear acceleration. Resolve ~r into components,
~r = ~r ⊥
where ~r ⊥
is perpendicular to ~ω and |~r ⊥
| is just the distance of our point
from the axis of rotation. ~r ‖
is parallel to ~ω.
Angular Momentum
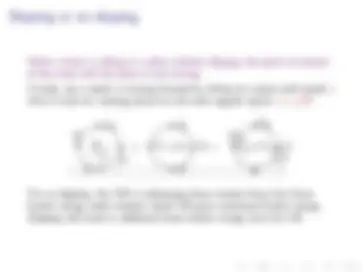
A disc is set in rotation about an axis from a state of rest. In order to
change its state of motion, some sort of force must have been applied i.e.
momentum has been changed. Can it be change of linear momentum?
Can’t be! Since linear momentum (tangential to the rotation) ~p = m~v of
two diametrically opposite points on the disc are opposite to each other,
the total linear momentum is zero!
Need a new momentum – angular momentum – defined as,
L = ~r × ~p = (~r ⊥
) × ~p = ~r ⊥ × ~p OR
L = ~r × ~p ⊥
for a point particle having position vector
r , which is resolved into
components parallel ~r ‖
and perpendicular ~r ⊥
to its momentum ~p, which
in turn can be resolved into components parallel ~p ‖
and perpendicular ~p ⊥
to position vector.
| |
| p |
r
| |
r | |
p
x x
y y
p
r r
p
_Lz
p Lz = r_
Torque
Opening / closing a door requires different linear forces at different
distances from hinge to get the same effect i.e. same angular
displacement / velocity / acceleration.
Need a new force – torque – defined as,
~τ = ~r ×
F = ~r ⊥
×
F OR ~r ×
F
⊥
for a point particle at position vector ~r , with ~r ⊥
being component
perpendicular to the force
F acted upon by,
F
⊥ being the component
perpendicular to ~r. This is very similar to angular momentum.
Examine the time rate of change of angular momentum
d
L
dt
d
dt
(~r × ~p) =
d~r
dt
× ~p + ~r ×
d~p
dt
= ~r ×
F ≡ ~τ
The term
d~r
dt
= ~v and hence ~v × m~v = 0. From Newton’s law, it follows
that
d~p
dt
F. Hence, torque is time rate of change of angular momentum.
Important to note that torque and force are mutually perpendicular.
Problems in Angular Momentum
Example. Sliding block – a block of mass m is sliding on a surface having
coefficient of friction μ. At some instant its velocity is v
i. What would
be its angular momentum and torque on it about the (a) origin, (b) l
j?
At an instant, let position of the block be x
i and external force −μmg
i.
−μ mg
x
y
z
l
v
x
(a) Position vector ~r = x
i. Angular momentum
L and torque ~τ are
L = x
i × mv
i = 0, ~τ = x
i × −μmg
i = 0.
(b) Position vector ~r = x
i − l
j. Angular momentum
L and torque ~τ are
L = (x
i − l
j) × mv
i = mvl
k, ~τ = (x
i − l
j) × −μmg
i = −μmgl
k
Since mdv /dt = −μmg , we have ~τ = d
L/dt.
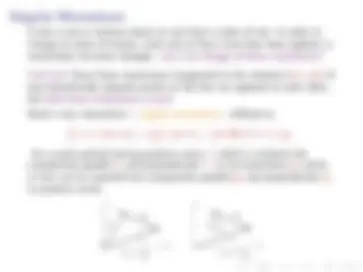
Example. Conical pendulum – instead of swinging in a vertical plane
about a pivot, it swings about an axis from a pivot tracing out circle on
horizontal plane containing the bob.
ω
α
p
r
La
A
B
z
r’
Lb
ω
α
A
B
z
r’
τ
l
M M
T
F
Origin A : Position vector ~r = rˆr of M is perpendicular to momentum
~p = Mr ω ϕˆ and force acting
F = T sin α(−ˆr ). Therefore,
L
a
= Mr
2
ω(ˆr × ϕˆ) = Mr
2
ω
k and ~τ a
= −Tr sin α(ˆr × ˆr ) = 0
~τ a = 0 is consistent with the fact d
L
a /dt = 0 i.e.
L
a is constant in both
magnitude and direction.
We used θ = π/2 in ˆr = sin θ cos ϕ
ˆ i + sin θ sin ϕ
ˆ j + cos θ
ˆ k, ϕˆ = − sin ϕ
ˆ i + cos ϕ
ˆ j.
Example. Kepler’s 2nd law of planetary motion – area swept out by
radius vector from Sun to a planet in a given time is the same for any
position of the planet in its orbit i.e. dA/dt is constant.
On a plane (θ = π/2), let two consecutive position vectors of the planet
in circular orbit be ~r 1
= r (cos ϕ 1
i + sin ϕ 1
j) and ~r 2
= r (cos ϕ 2
i + sin ϕ 2
j).
Area swept out for small change in angle ∆ϕ ≈ ϕ 1 ∼ ϕ 2 is,
∆
~ A =
1
2
~r 1 × ~r 2 =
1
2
r
2 sin(ϕ 1 ∼ ϕ 2 ) ˆk =
1
2
r
2 sin ∆ϕ
ˆ k ≈
1
2
r
2 ∆ϕ
ˆ k.
Therefore, the rate at which area swept out is,
A = lim
∆→ 0
∆A/∆t = r
2
ϕ/˙ 2.
The velocity of the planet on its orbit is ~v = ˙rˆr + r ϕ˙ ϕˆ. Hence,
L =
r × m
v = mrˆr × (˙rˆr + r ϕ˙ ϕˆ) = mr
2
ϕ˙
k.
Which implies dA/dt = L z / 2 m. For central force i.e.
F = f (r )ˆr , torque
on the planet about the origin is ~τ = ~r × f (r )ˆr = 0 and in absence of any
external torque,
L is constant. So dA/dt is also constant.
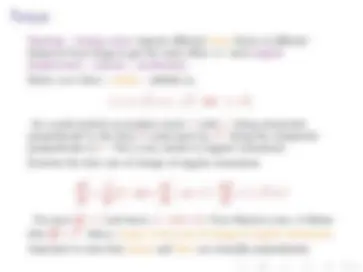
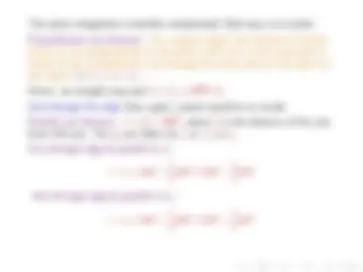
Example. Getting captured by gravity – Aiming an unpowered
(hypothetical, of course) spacecraft to hit a far-off planet.
A planet of radius R presents us a disc of area πR
2
as a target. Without
its gravity, it would be quite a challenge to control the initial thrust to
keep the spacecraft within this area. However, situation is much more
favourable. Gravitational attraction of the planet tends to deflect the
spacecraft towards itself even if it is (not too much) outside the πR
2
area. Gravity essentially increases the effective area of hit.
b R
b’
b"
r
v
φ
planet
spacecraft
A
m
M
When the spacecraft is relatively far away from planet, take its trajectory
to be parallel to the axis A connecting some conveniently chosen origin
with the center of the planet. Define impact parameter b as distance
between the initial trajectory and the axis. Without gravity, b ≤ R for
assured hit. Impact parameter for grazing hit is b
′
and for misses b
′′
b
′
.
Angular momenta of system of particles
Rigid body : best way to view it as system of particles. The i-th particle
having mass m i at the position r i from a suitably chosen origin. Then
r ij = |~r i − ~r j | = constant. Typically origin is on the fixed axis of rotation.
Linear displacement, momentum and force(s) acting upon are the same
for each particles – point and extended bodies could be treated same way
- motion of center of mass.
If rotation i.e. motion about an axis is involved – linear displacement,
momentum and force(s) acting upon are different for particles at different
positions from axis. For constant angular displacement ϕ and velocity ω,
d
r i = d ϕ~ ×
r i
v i = ~ω ×
r i
p i = m i
v i
Angular momentum of the system
L is the vector sum of the individual
angular momenta
L
i
L
i = ~r i × ~p i
L =
N ∑
i=
L
i
N ∑
i=
~r i × ~p i
Later we will connect
L with ~ω in a way analogous to ~p = m~v.
Torque on system of particles
Expression for torque ~τ follows from time rate of change of angular
momentum
L,
d
~ L
dt
=
d
dt
∑
i
~ L i =
∑
i
(
d~r i
dt
× ~p i
d~p i
dt
)
Because d~r i
/dt = ~v i
, first term in parentheses vanishes and d~p i
/dt =
F
i
d
L
dt
i
~r i
×
F
i
i
~τ i
= ~τ
ext
int
We are going to assume all internal forces are directed along the line
connecting two interacting particles then the internal torque about the
origin ~τ
int
= 0, hence
N ∑
i=
(
~r i ×
~ F i
)
=
∑
i
~τ i = ~τ
ext
=
d
~ L
dt
Connecting torque ~τ to ~α analogous to
F = m~a will follow later.
Moment of Inertia
Total rotational kinetic energy is
K −
N ∑
i=
K i =
1
2
N ∑
i=
m i r
2
i ⊥
ω
2 ≡
1
2
I ω
2
I is the moment of inertia of a rigid body. I serves the same purpose for
rotational kinetic energy as does mass for kinetic energy in linear motion.
Greater the I , harder is to change its rotational state.
Moment of inertia depends on geometry and distribution of mass in rigid
body. It depends on the position of axis about which it is calculated. For
continuous distribution of matter, with mass density ρ,
I =
∑
i
m i r
2
i ⊥
→ I =
∫
r
2
⊥
dm =
∫
r
2
⊥
ρ dV
The angular momentum of a rigid body is thus,
~ L =
∑
i
~ L i =
∑
i
~r i ⊥ × ~p i =
∑
i
m i ~r i ⊥ × (~ω × ~r i ⊥ )
=
∑
i
m i [~ω (~r i ⊥ · ~r i ⊥ ) − ~r i ⊥ (~ω · ~r i ⊥ )]
=
∑
i
m i
r
2
i ⊥
~ω = I ~ω
Rotational motion of rigid body
Hence, dynamical equations for pure rotation are
K =
1
2
I ω
2
,
~ L = I ~ω, ~τ = I ~α
An equivalent of center of mass motion (CM) for rotation can be
obtained by considering rotation about axis through CM and defining
radius of gyration k and mass M =
∑
i
m i
I 0
=
∑
i
m i
r
2
i ⊥
≡ M k
2 .
Let the position vector of CM be
R and the CM coordinate for i-th
particle be ~r
′
i
, then
M
~ R =
∑
i
m i
~r i
and ~r i
=
~ R + ~r
′
i
, ⇒ ~v i
=
~ V + ~v
′
i
where
V is velocity of CM and v
′
i
is velocity of i-th particle in CM
frame. Total angular momentum of the body is,
~ L =
∑
i
~r i × m i ~v i =
∑
i
(
~ R + ~r
′
i
)
× m i
(
~ V + ~v
′
i
)
=
~ R ×
∑
i
m i
~ V +
~ R ×
∑
i
m i
~v
′
i
∑
m i
~r
′
i
×
~ V +
∑
i
m i
~r
′
i
× ~v
′
i
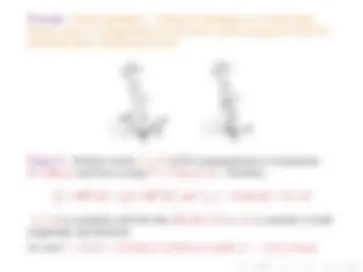
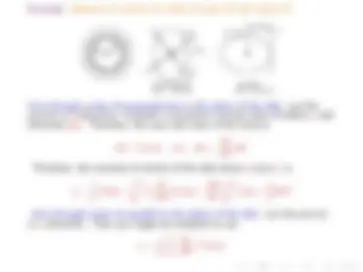
Example. Moment of inertia of a disk of mass M and radius R.
������
������
������
������
������
������
������
������
������
������
������
������
������
������
������
������
������
������
������
������
������
������
������
������
R
ρ Iz
Ix
Iy
d
I Iz = Io
parallel
theorem
perpendicular
axis theorem axis
Axis through center & perpendicular to the plane of the disk. Let the
axis be in z-direction. Consider a concentric circular strip of radius ρ and
thickness dρ. Therefore, the area and mass of the strip is,
dA = 2πρ dρ and dm =
M
πR
2
dA.
Therefore, the moment of inertia of the disk about z-axis I z
is
I z =
∫
ρ
2 dm =
∫ R
0
ρ
2
M
πR
2
2 πρ dρ =
2 M
R
2
∫ R
0
ρ
3 dρ =
1
2
M R
2
Axis through center & parallel to the plane of the disk. Let the axis be
in x-direction. Then you might be tempted to use
I x =
∫
x
∫
y
M
πR
2
x
2 dx dy
The above integration is horribly complicated! Best way is to invoke
Perpendicular axis theorem : For a planar object, the moment of inertia
about an axis perpendicular to the plane is the sum of the moments of
inertia of two perpendicular axes through the same point in the plane of
the object i.e. I z
= I
x
+ I
y
Hence, we straight away get I x
= I
y
= MR
2 /4.
Axis through the edge Once again, easiest would be to invoke
Parallel axis theorem : I = I 0
2 , where d is the distance of the axis
from CM axis. The I 0
can either be I z
or I x
or I y
Axis through edge & parallel to I z
I = I z
2
1
2
MR
2
2
3
2
MR
2
Axis through edge & parallel to I x
I = I x
2
1
4
MR
2
2
5
4
MR
2